

News
-
News: Oct 4, 2016Open Day 2016 Success!
-
News: Sep 30, 2016ESTEC Open Day 2016 Prep
-
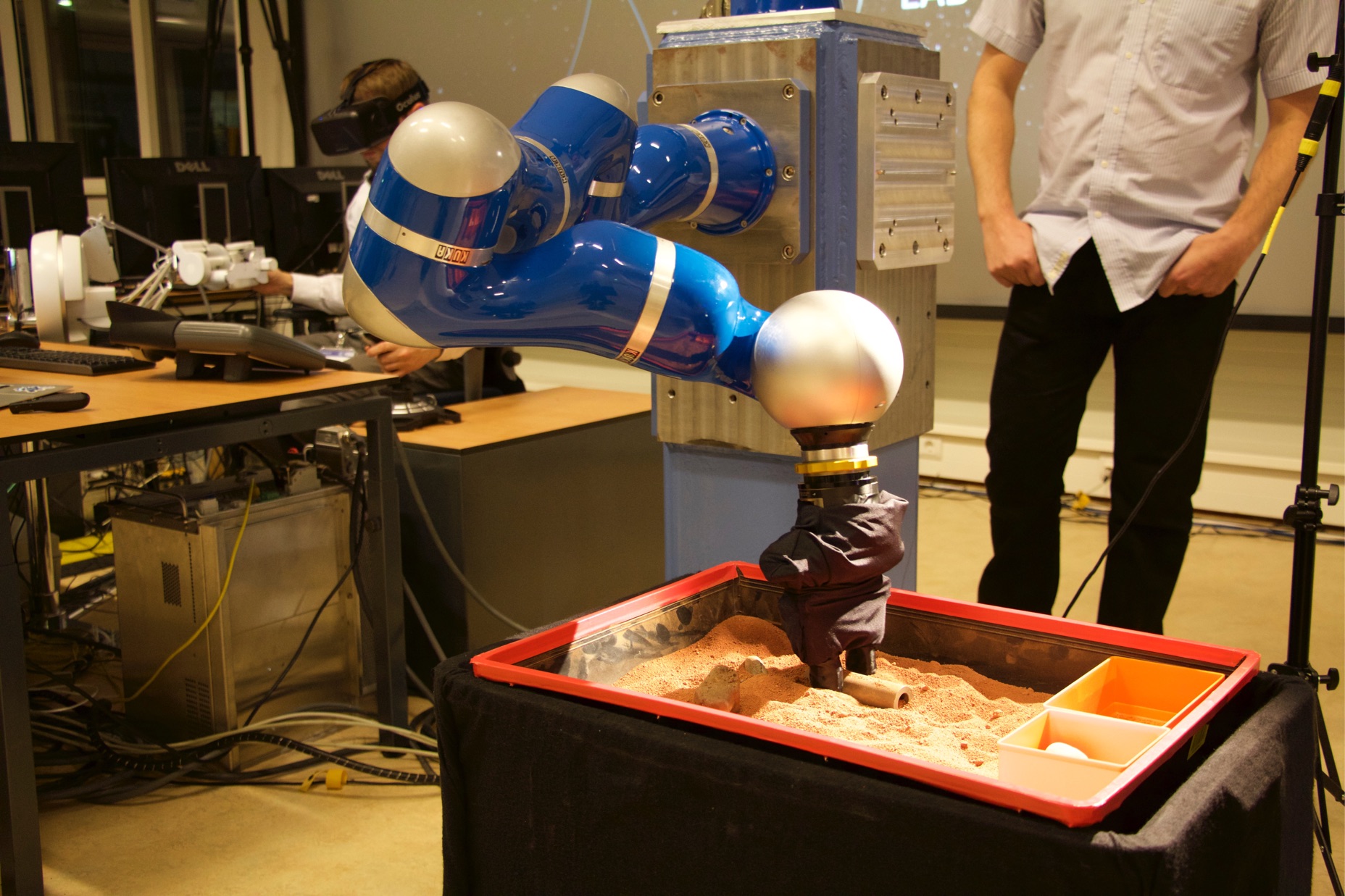
News: Sep 9, 2015We did it ! Sub-millimeter task from Space
-
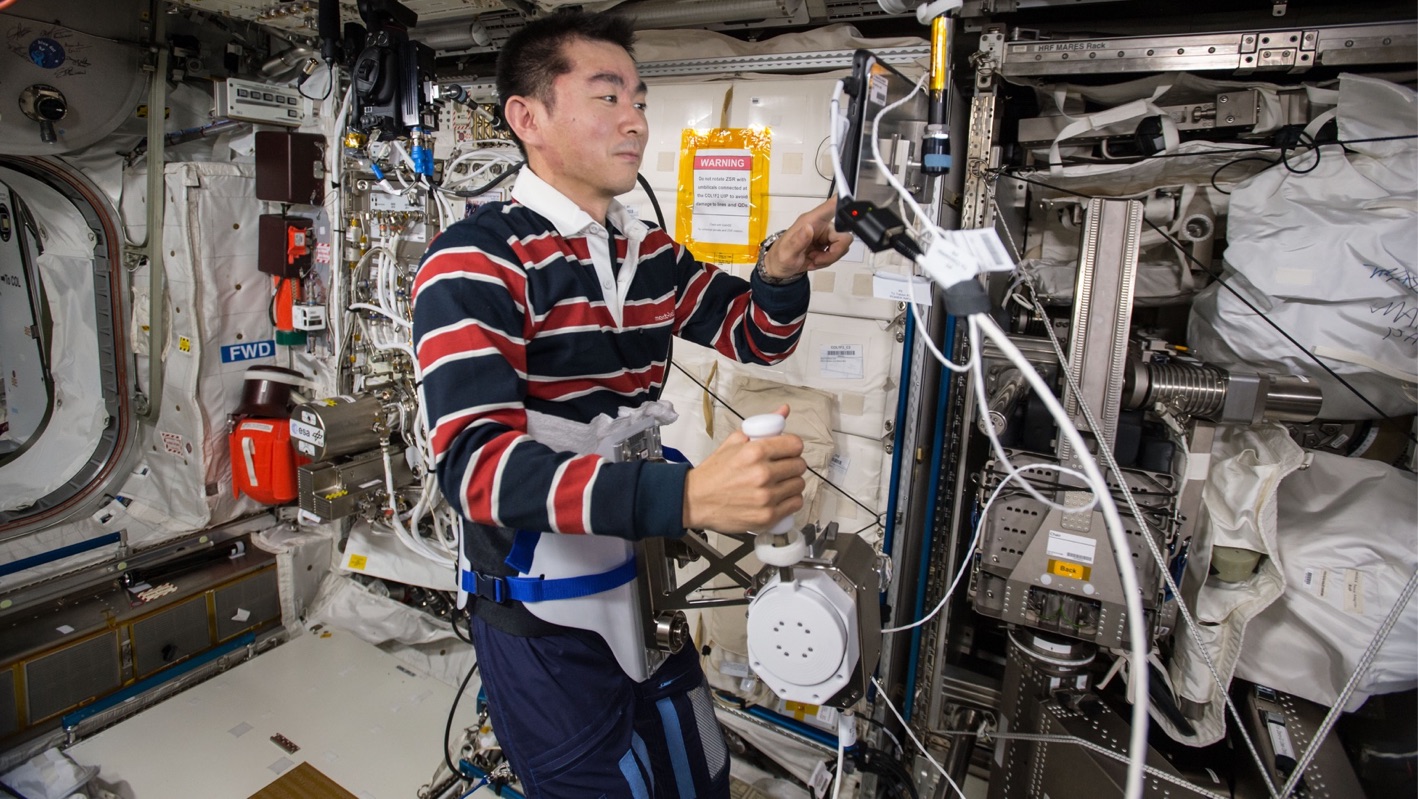
News: Aug 14, 2015Haptics-2 second trial with Kimiya Yui!
Telerobotics, Haptics & Human-Robot Interfaces
Closing gaps between academia and industry to improve European competitiveness!
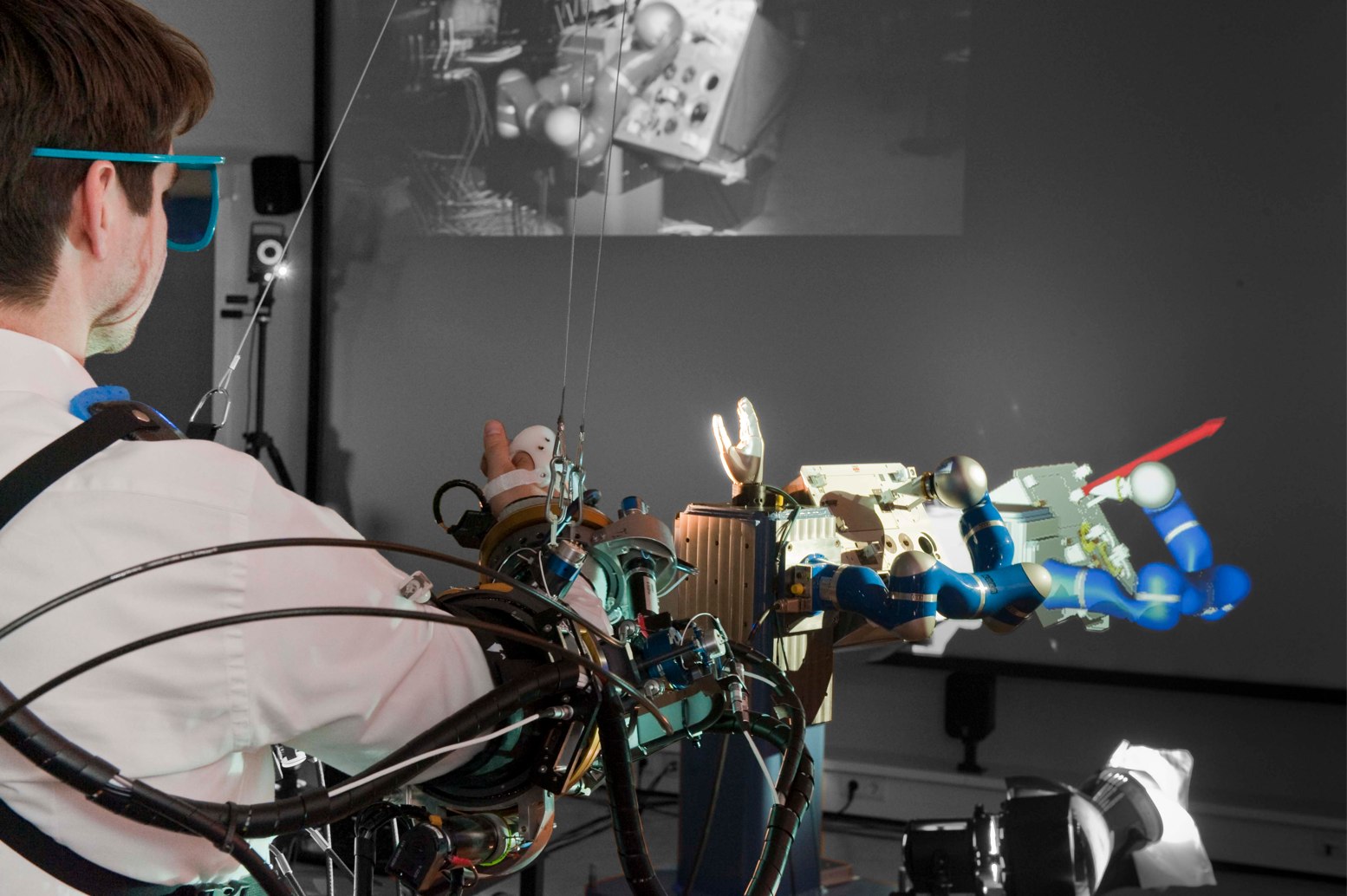
The ESA Telerobotics & Haptics Laboratory is an engineering research laboratory that performs fundamental research in the domains of telerobotics, mechatronics, haptics and human-robot interaction. The Laboratory output is targeted at supporting novel spaceflight projects by pre-development and demonstration of critical technologies.
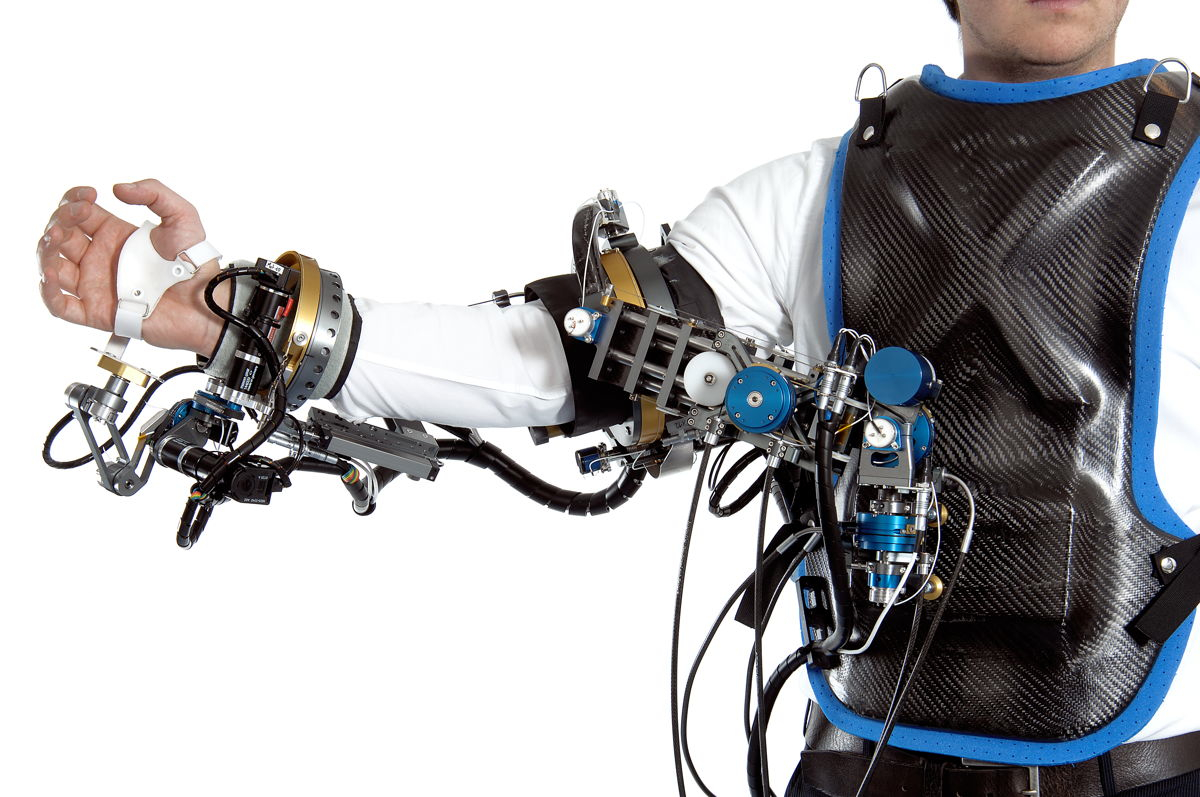
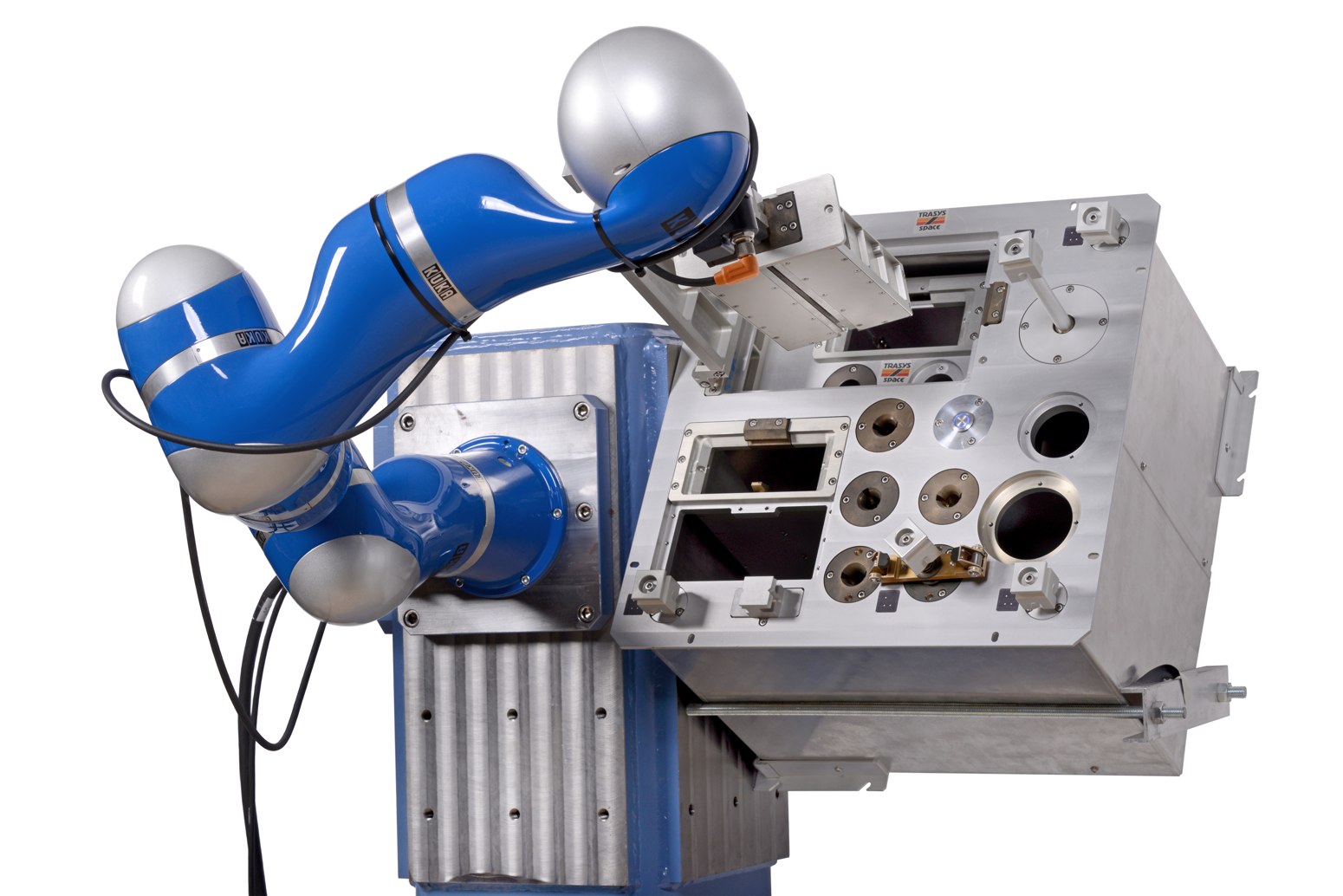
The research areas of the laboratory are in (1) the design of human-centric mechatronic haptic devices, in (2) control for distributed telerobotic systems, in (3) the optimization of perceptive feedback for humans, and in (4) the design and development of advanced computational frameworks, tools and API’s to support general telerobotics and mechatronics research.
The laboratory is at the forefront of research in (HCM). Our team of researchers and engineers are dedicated to developing innovative solutions for managing and maximizing the potential of human capital in various industries, including mechatronics and telerobotics.
The laboratory is at the forefront of research in Human Capital Management (HCM). Our team of researchers and engineers are dedicated to developing innovative solutions for managing and maximizing the potential of human capital in various industries, including mechatronics and telerobotics.
One of our main research areas is the design of human-centric mechatronic haptic devices. These devices are specifically designed to provide tactile feedback to users in real-time, enhancing their perception and control of remote robotic systems. Our goal is to create user-friendly and efficient haptic devices that can be utilized in various industries to improve human-robot interaction and increase productivity.